 1 Year Warranty
1 Year WarrantyDescription
Overview
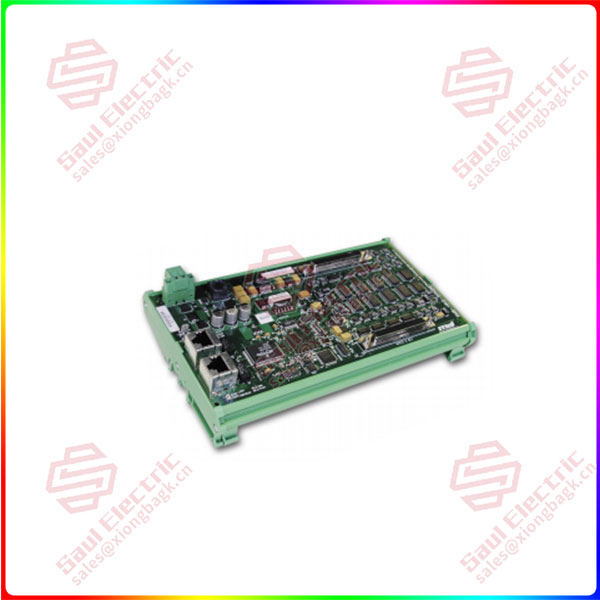
Essential details:RMB-10V2-SYNQNET Remote Motion Block
MEI’s Remote Motion Block (RMB) is designed to connect
conventional analog drives into a SynqNet® motion network system.
Each Remote Motion Block can support up to four axes of high precision analog drives, including encoder feedback, DAC outputs, transceivers, and associated I/O.
The RMB is designed to support instances where a SynqNet drive is not available or suitable for certain applications. Remote Motion Blocks are also ideal for rapid prototyping with existing machine components.
SynqNet motion control networks provide a 100Mbps synchronous realtime connection between motion controllers and torque drives, stepper drives, and I/O modules. SynqNet is the only digital motion control network that offers true plug and play interoperable node support, fault tolerant operation, robust service channel capabilities, firmware & configuration file upload/download, as well as a dramatic reduction in system wiring.
RMB-10V2-SYNQNET
lf you need to inquire or purchase ,please send the product models to my email or call medirectly .
sunny He
[Email] sales@saulcontrol.com
[Mobile] 86-18059884797
[WhatsApp] 86-18059884797
[Skype] sales@saulcontrol.com
RMB-10V2-SYNQNET Remote Motion Block
The working principle of the servo driver is to receive the control signal from the upper controller and convert it into the corresponding motor control signal, so as to realize the precise control of the motor.
Specifically, the servo driver usually includes a position controller, a speed controller and a current controller. By receiving the position instruction sent by the upper controller, the position controller calculates the Angle and speed that the motor needs to rotate, and converts it into the corresponding current signal and sends it to the current controller. The current controller controls the current of the motor according to the received current signal, so as to achieve accurate control of the motor.
In practical applications, servo drivers are usually equipped with feedback devices such as encoders, which are used to monitor the position and speed of the motor in real time, and feed it back to the position controller, so as to achieve closed-loop control of the motor and improve control accuracy and stability.
In short, the working principle of the servo driver is to receive the control signal, convert it into the motor control signal, and control the current size of the motor through the current controller, so as to achieve accurate control of the motor.







